WPROWADZENIE
Opisywana praca powstała w roku 1996 w wyniku współpracy grupy z Aalborg University (Klaus Havelund, Arne Skou, Kim Guldstrand Larsen, Kristian Lund) a duńską firmą Bang & Olufsen. Jest przykładem zastosowania UPPAALa do rozwiązania typowo przemysłowego problemu.
Analizie poddany został protokół komunikacyjny dla urządzeń audio/video firmy B&O. Protokół zawierał nieznany błąd, który objawiał się okazjonalnym gubieniem danych.
Stworzenie modelu zostało przeprowadzone w 5 iteracjach i zajęło 3 miesiące. Dokumentacja protokołu składała się wyłącznie z diagramów przepływu (flow charts; 3 strony) i kodu w assemblerze (2800 linii). Model tworzono w oparciu głównie o symulację, analizę diagramów i rozmowy z B&O. Kilkukrotnie pojawiła się potrzeba wyciągania szczegółów z kodu. Ostateczna wersja została zaakceptowana przez B&O jako prawidłowa abstrakcja istniejącej implementacji.
Graficzna reprezentacja automatów z czasem okazała się bardzo dobrym sposobem komunikacji pomiędzy twórcami protokołu a grupą zajmującą się weryfikacją.
PROTOKÓŁ
Środowisko
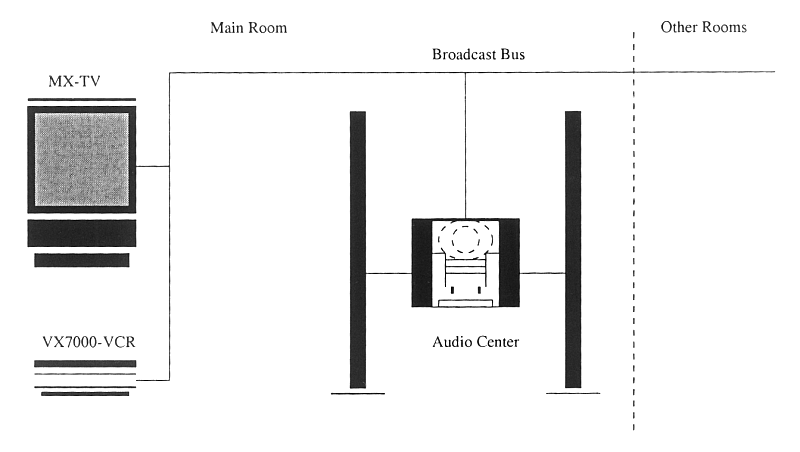
Środowisko, w którym protokół działa, to magistrala (bus) i podłączone do niej urządzenia audio/video.
Niższe warstwy protokołu
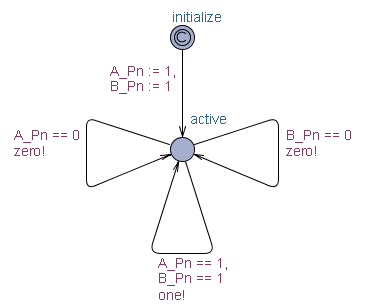
Magistrala przyjmuje dwa stany: 0 i 1. Działa przy tym na zasadzie koniunkcji - jeśli jakiekolwiek urządzenie nadaje 0, to magistrala jest w stanie 0. Z tego powodu cisza reprezentowana jest przez 1.
Podstawową jednostką przesyłaną przez magistralę jest ramka. Ramka zbudowana jest z T-messages w następujący sposób:
T-message Ti ma następującą postać.

Wprowadza się też pojęcie sygnału zakłócającego (jamming signal), który jest reprezentowany przez 0 nadawane przez 25 ms. Jest on nadawany przez urządzenie, które wykryje kolizję.
Wyższe warstwy protokołu
Protokół został podzielony na 4 fazy:
Wyspecyfikowano też szereg reguł, opisujących zachowanie protokołu.
MODEL
Przy tworzeniu modelu pominięto nieistotne aspekty protokółu i implementacji - dla przykładu nie jest w żaden sposób modelowane odbieranie ramek.
Ostateczna wersja modelu składa się z 9 automatów:
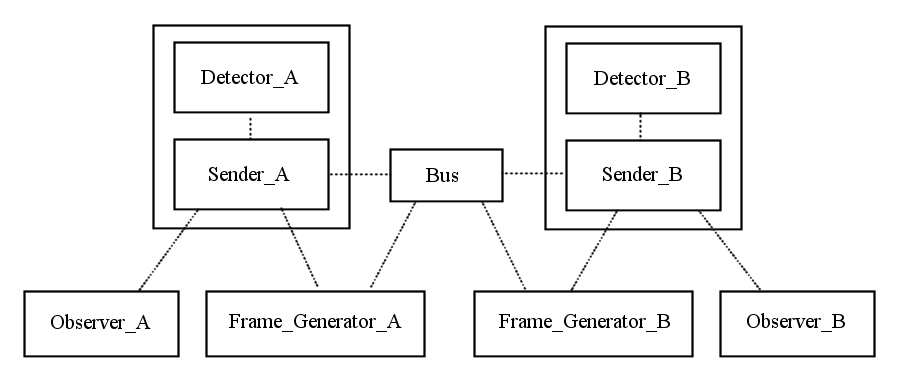
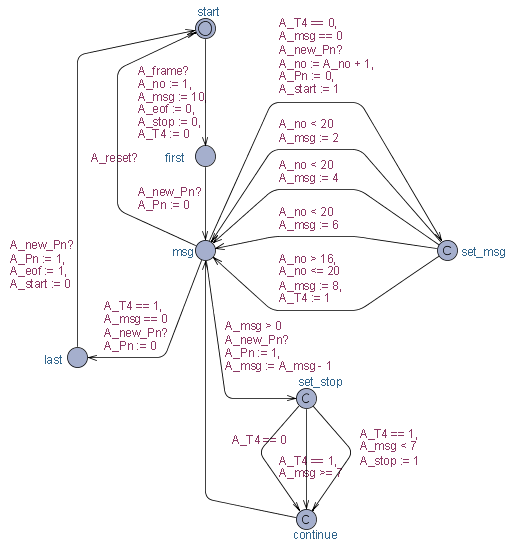
Komunikacja odbywa się przez kanału i zmienne dzielone. Każde urządzenie posiada jeden zegar lokalny, który znajduje się w Sender.
Bus
Frame_Generator_A
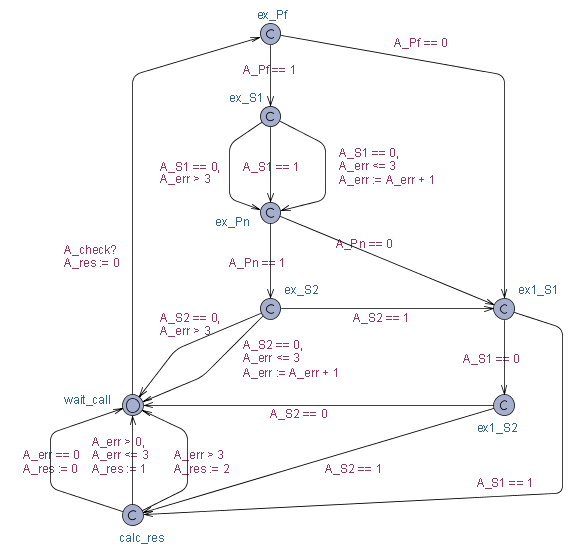
Detector_A
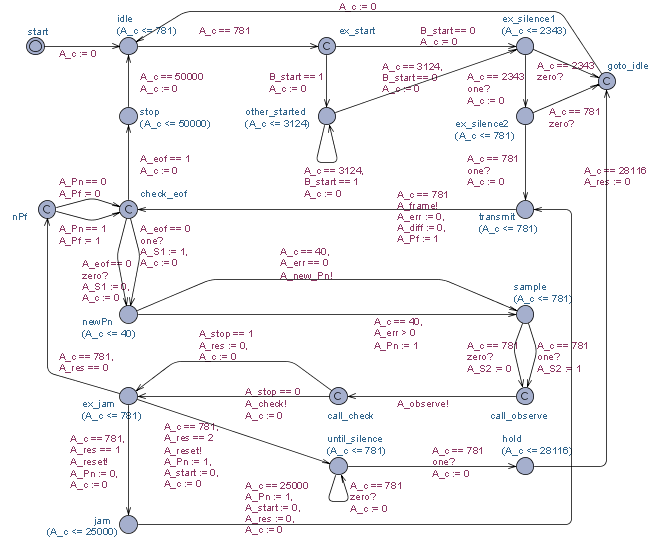
Sender_A
WERYFIKACJA
Sformułowanie reguły poprawności nie było proste, bowiem należało to zrobić tak, aby wykryć błąd, o którego źródle nic nie było wiadomo. Podobnie jak model reguła poprawności przeszła przez kilka iteracji.
Przypomnijmy:
Trzeba zdefiniować co oznacza, że ramka została zniszczona. Ramkę uznajemy za zniszczoną, jeśli bity nadawane przez urządzenie są różne od wartości odczytanych przez urządzenie z magistrali.
Automat Observer jest wprowadzony do systemu po to, aby sprawdzać poprawność.
Observer_A
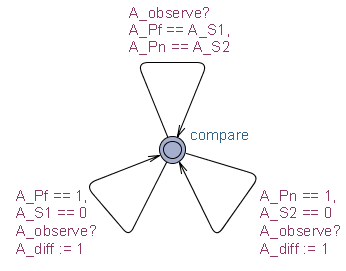
Forumuła odpowiedzialna za poprawność wyraża się następująco:
W celu wydajnej weryfikacji z opisanego modelu wyprowadzoną prostszą wersję. Automat Frame_Generator zmodyfikowano tak, aby produkował ramki zawierające wyłącznie T1. Rozważano także dwa inne ograniczenia:
Błąd
UPPAAL wykrył, że tak sforumłowana reguła poprawności nie jest spełniona. W uproszczonej wersji modelu zajęło mu to kilka minut. Ślad składał się z 1998 pojedynczych tranzycji. Można zatem spodziewać się, że znalezienie tego błędu bez pomocy narzędzia byłoby bardzo trudne.
Ślad, który wygenerował UPPAAL można, nie wchodząc w szegóły opisać następująco:
Urządzenie A wysyła ramkę składającą się z 15 T1.
Urządzenie B wysyłą ramkę składającą się z 16 T1.
Ramki są identyczne aż do T4 kończącej ramkę wysłaną przez A.
Dodatkowo B wysyła swoją ramkę z opóźnieniem dokładnie 40 * 10-6s w
stosunku do A.
Okazuje się, że B wykryje kolizję i zacznie zakłocać. Natomiast A kończy wykrywanie kolizji zbyt szybko, by to zauważyć - ramka wysłana przez
A jest zniszczona i nie będzie zretransmitowana.
Warto wspomnieć o tym, że gdy znana była przyczyna błędu, udało się wywołać go "w rzeczywistości" (w laboratorium B&O).
POPRAWIONY MODEL
Wina leży w Detection Stop Rule. Regułę tę wprowadzno, aby zapobiec duplikacji ramek, które pojawiło by się, gdyby wykrywanie kolizji było przeprowadzane zbyt długo. Rozwiązanie problemu było proste - należy zakończyć wykrywanie kolizji troszeczkę później (nie wchodząć w szczegóły).
Po wprowadzeniu stosownych modyfikacji do modelu okazało się, że UPPAAL zweryfikował regułę poprawności pozytywnie. Zajęło mu to na uproszonej wersji modelu około 30 minut.
PODSUMOWANIE
W wyniku zastosowania UPPAALa udało się znaleźć błąd w istniejącym i używanym protokole "przemysłowym". Co więcej, wydaje się, że znalezienie tego błędu tradycyjnymi metodami byłoby trudne.
UPPAAL pomógł też w zweryfikowaniu poprawności nowej wersji algorytmu.
Warto podkreślić jeszcze raz, że graficzna reprezentacja automatów z czasem okazała się bardzo skutecznym sposobem komunikacji.
Pliki UPPAALowe znajdują się tutaj.